Après les robots réels marcheurs de tout type, voici différentes simulations de marche virtuelle, avec et sans contraintes biomécaniques, avec différents degrés de réussite.
Ce qui est extrèment intéressant, c'est que c'est une simulation, et qu'elle est réalisée sans input d'un animateur, sans doute de manière itérative, comme la théorie de l'évolution le défini : on ne garde que les bêtes qui marchent sans tomber et on optimise à chaque étape juqu'à ce que ça marche.
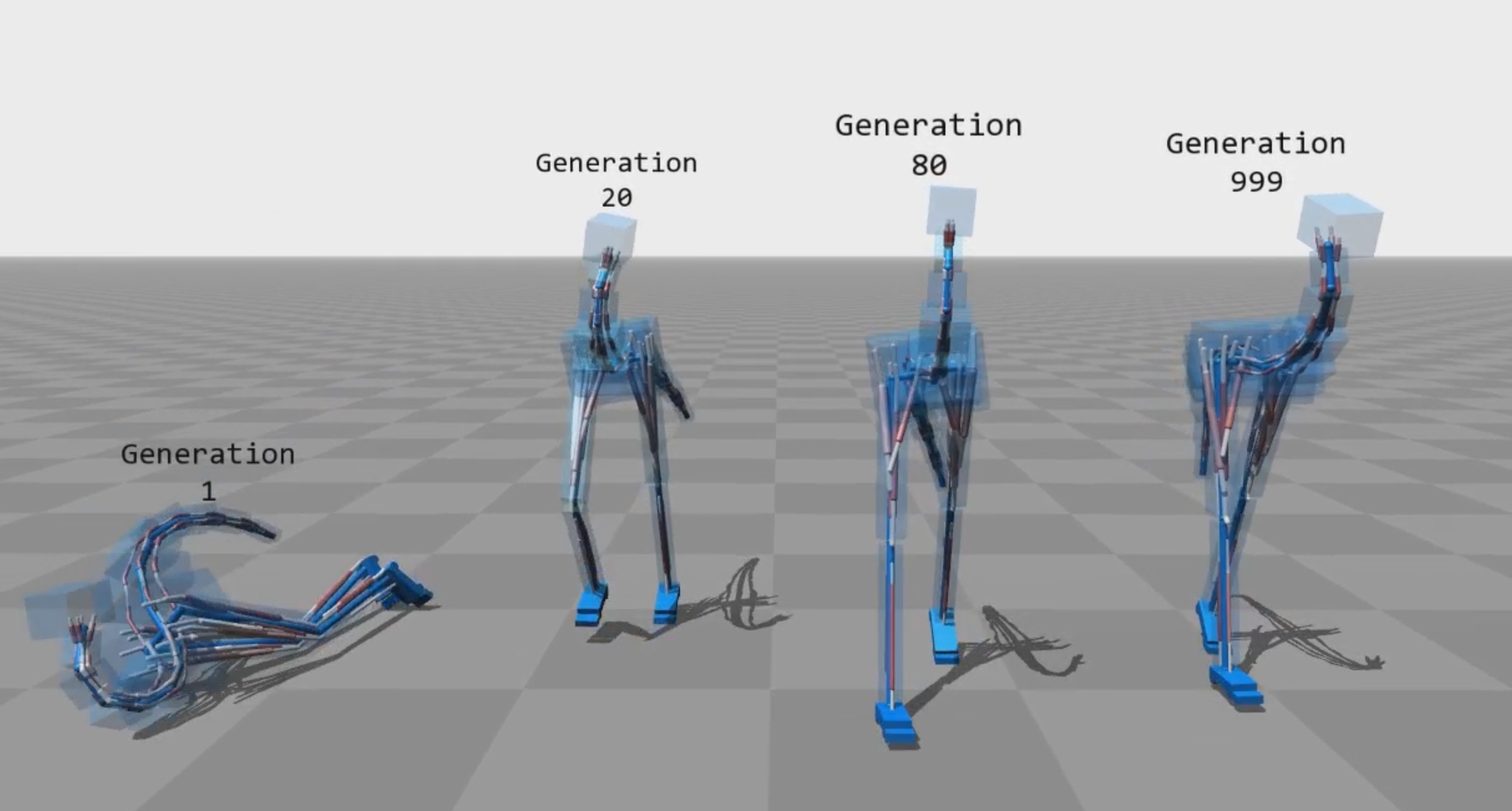
Il faut entre 200 et 1000 générations pour que le modèle ateigne son but de marche stable, à une vitesse déterminée.
"We present a muscle-based control method for simulated bipeds in which both the muscle routing and control parameters are optimized. This yields a generic locomotion control method that supports a variety of bipedal creatures. All actuation forces are the result of 3D simulated muscles, and a model of neural delay is included for all feedback paths. As a result, our controllers generate torque patterns that incorporate biomechanical constraints. The synthesized controllers find different gaits based on target speed, can cope with uneven terrain and external perturbations, and can steer to target directions."
On peut lire la recherche ici : www.cs.ubc.ca/~van/papers/2013-TOG-MuscleBasedBipeds/2013-TOG-MuscleBasedBipeds.pdf
Leave a Reply